ガバナフリー運転とロードリミット運転の機能については、Web Site にたくさんの説明がアップロードされています。「ガバナフリー運転」あるいは「ロードリミット運転」で検索してみて下さい。
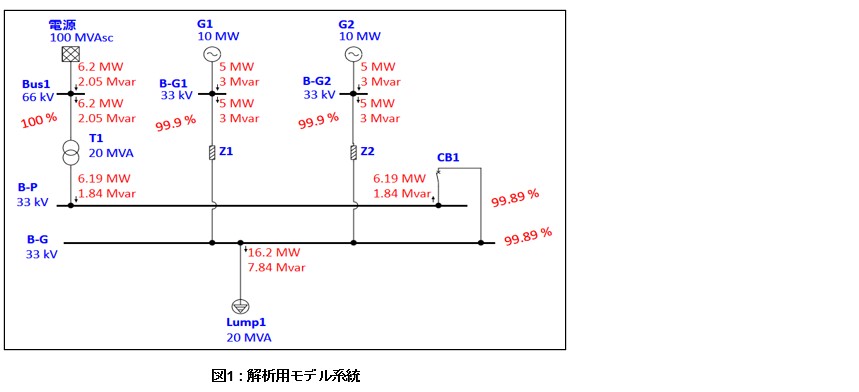
ここでは実際に過度安定度解析にてどのような挙動の違いがあるか etap を用いてご紹介します。説明のために下図のような簡単なモデル系統を作成しました。この系統で下記のような過渡安定度解析を実施します。
イベント1 E1 [0.10秒] : 受電点(母線:Bus1)にて3相短絡事故が発生
イベント2 E2 [0.30秒] : 事故により母線連絡(遮断器:CB1)がトリップ => 系統解列に至る
Case-1:ガバナフリー運転 評価 〇
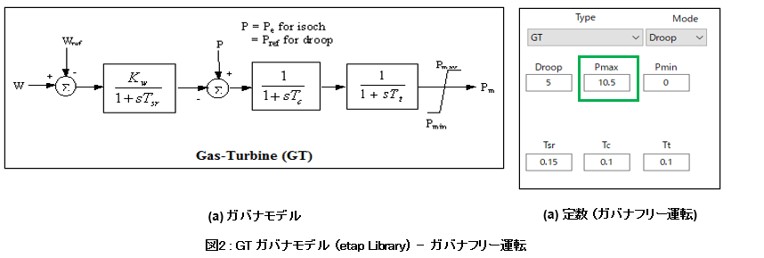
ガバナフリー運転では下図のETAPに登録されている ガバナモデル 「GT(ガスタービンモデル)」を用いて計算を実施します。 ガバナフリー運転ではガバナの出力に特に制限が設けられていないので Pmax は発電機の定格+5% (10MW x 1.05 = 10.5MW) として計算を実施しました。 図2に計算に使用したガバナモデルをまとめます。
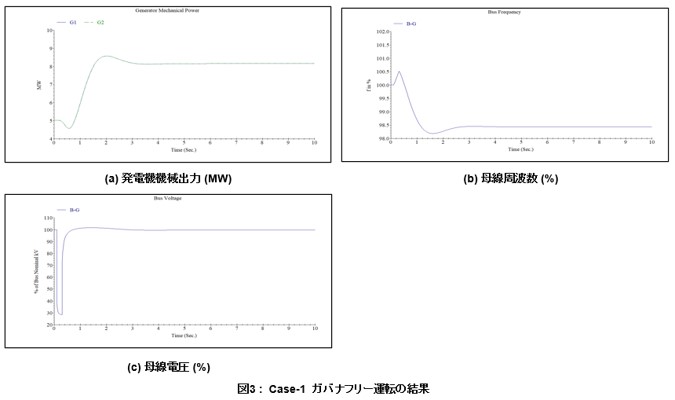
系統解列後、発電機は一括負荷「Lump1」の16.2MWを負担するために機械出力が上昇します。ガバナモデルをドループ運転としているため出力が上昇した値にドループ分の比率で比例して周波数が低下しています。系統解列後、電圧は回復し、周波数も整定しているため継続運転できます。
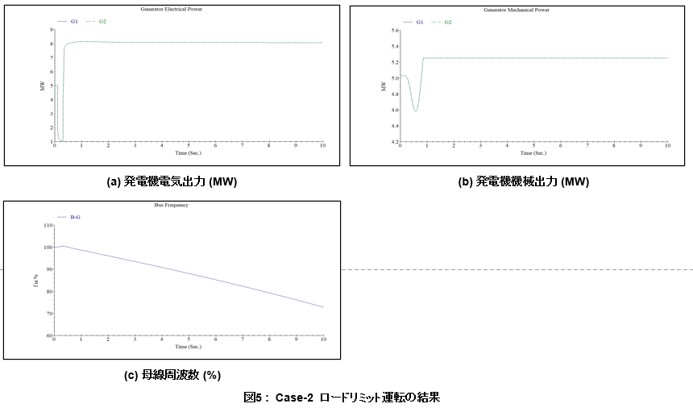
Case-2:ロードリミット運転 評価 ×
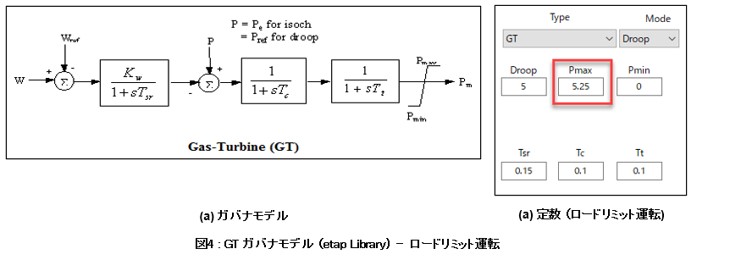
ロードリミット運転では機械出力が系統整定後、もしくは過度応答中に制限した負荷量以上出力できないよう制限されています。 実際に図2の(b)にて Pmax の値をロードリミット運転にて初期出力の 5MWの+5%(5MW x 1.05 = 5.25MW)以上出力できないものとして解析を実施します。
電気出力は発電機の定格が10MWずつあるので十分ですが、機械出力がロードリミット運転によって発電機定格の約半分に制限されているので十分ではありません。これにより周波数が低下し続け、系統が継続運転できないことが分かります。
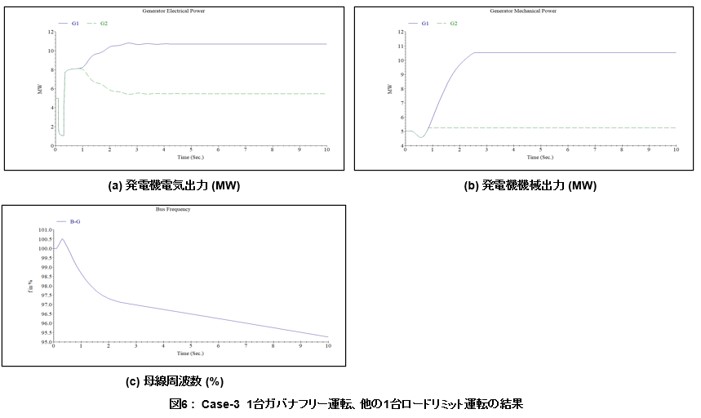
Case-3:ガバナフリーとロードリミット運転 評価 △ => 負荷選択遮断など対応策の検討が必要
ここまでのケースでは発電機を両方同じ制御で解析を実施しました。Case-3では片方の発電機をガバナフリー運転、残った発電機をロードリミット運転で計算を実施します。 図6にまとめたように片方の発電機は機械出力が上昇し、残った発電機はロードリミットによって機械出力が制限されます。 系統が安定し始めたところでロードリミット運転側の発電機は機械出力に合わせて電気出力が絞られていきます。今回の計算時間10秒では周波数の低下が5%以内(周波数が95%以上)に収まっていますが、時間を延長すると波数が低下し続けて10%以上低下するのでこのケースも系統解列後継続運転ができません。
従ってこのケースの結果から判断して、系統解列後、遅くても10秒以内に負荷選択遮断などの対策の検討が必要と言えます。
まとめ
今回の例ではロードリミットによって発電機の機械出力の制限が最初からかかっているようなモデリングを実施しました。 実際のモデルによって出力を絞る動作が系統安定後や、計算から1,2秒後にかかるといった違いがある場合があります。 系統解列後に発電機の出力が初期値よりも大きくなる場合はロードリミット運転によって制限がないかご確認の上解析を実施するようご注意ください。
回答の全文(pdf ファイル)については、質問項目 2020-0012.pdf をクリックして、ご参照下さい。
(株式会社エルテクス設計 片山さんからの回答です)
(事務局より)
「Q&Aゾーン」のページから「AVR」または「ガバナ」で検索すると、下記のようなQ&Aを見ることができます。
2020-0012 過渡安定度解析におけるガバナフリー運転とロードリミット運転について
2020-0013 過渡安定度解析における制御ブロックのモデリングの評価
2020-0014 過渡安定度解析におけるAVRとAPFRの応答の違い
2020-0023 発電機の AVR と APFR の応答の違い
2021-0088 (電動機始動) 発電機のAVRの有無による電動機の始動時間への影響
2021-0089 (モデリング) 発電機のダイナミックモデリング
また、「発電機」で検索すると、上記を含め10件以上のQ&Aを見ることができます。併せて、ご覧になって下さい。