先ず、電動機始動時間の計算式について確認しておきましょう。
始動時間 t (s)
= [ GD2 (kg-m2) x N (rpm) ] / [ 375 x Ta (kgf-m) ]
= [ GD2 (kg-m2) x N (rpm) ] / [ 9.55 x Ta (N-m) ]
ここで、GD2 : 慣性モーメント(電動機と負荷の合計値)、 N : 電動機の定格速度 (rpm)、Ta : 加速トルク(電動機発生トルクと負荷トルクの差)です。
電動機の始動時間を計算のために必要なデータとして、 ① 慣性モーメント(GD2またはWR2)あるいは慣性定数(HまたはM)② 電動機の定格速度または すべり ③ 電動機および負荷のトルク特性、 についてのデータが必要です。このようなデータを電動機および負荷の試験成績書、あるいはメーカーから入手して、始動時間を計算します。
1. 慣性モーメント(GD2またはWR2)と慣性定数(HまたはM)の関係
慣性定数(H)と慣性モーメント(WR2)の関係式は、
H = 5.48 x 10-9 x WR2 x rpm2 / MVA (この式で、10-9 は 10 の -9乗です)
ここで、WR2 (kg-m2) = GD2 / 4 (kg-m2), M = 2H
a. 慣性定数(H)の一般的な値は、負荷のタイプによって概略下記の値です。
b. 慣性モーメントの計算方法については、下記のURLをご参考にして下さい。
慣性モーメントの計算方法(住友重機械工業株式会社のサイト
https://cyclo.shi.co.jp/technical/pdf/inv430.pdf
回転運動に対するまとめ(ATP (EMTP) の小さな研究室のサイト)
http://atp-emtp-reserch.o.oo7.jp/basic_rotational_kinematics_rev3.pdf
2. 電動機の速度と すべり の関係
同期速度 (Ns)、定格速度 (N) と すべり (s) の関係は、
Ns = 120 x f / P
S = (Ns – N) / Ns
ここで、f は周波数、P は極数
3. 電動機および負荷のトルク特性
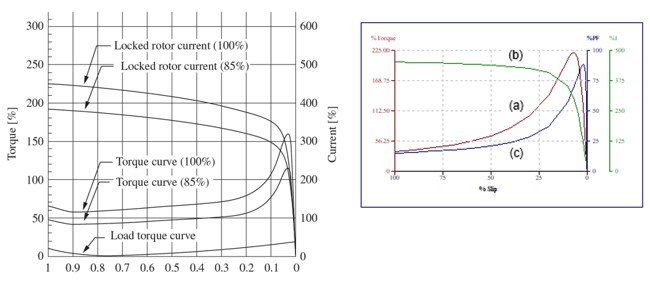
左図はメーカーから受領した電動機および負荷のトルク特性カーブの例、右図は始動トルク (a)、始動電流 (b)、始動力率 (c) についての特性の例です。
下記のURL(明電舎のサイト)に「電動機および負荷のトルク特性、電動機の回転速度および始動電流との関係」が分かり易く説明されていますので、ご参考にして下さい。
誘導電動機のトルク特性と始動方式(明電舎のサイト)
問題点と対応策:
誘導電動機が始動する場合、定格電流の約6~8倍の始動電流が流れ、かつ始動力率が非常に低いため、電源系統および配電系統の電圧変動の要因となり、電動機の端子電圧がかなり低下します。電動機の端子電圧が低下すると電動機のトルクは電圧の2乗に比例するため更に大きく低下します(電圧が70%まで低下するとトルクはその2乗となる49%まで低下します)。同時に、電動機の始動電流および始動力率が電動機速度の上昇に伴って変化します(上記の右図参照)。
このような誘導電動機の特性により、電動機の始動時間を正確に計算するためにダイナミックな解析が可能なツールが必要です。「電動機の始動計算に便利なツール」については、質問番号 2020-0086 に対する回答をご参照下さい。
上記のような理由により始動時間が非常に長くなる、始動できない(始動渋滞)、あるいは電源系統や配電系統に影響を与えることなどが生じます。このような場合は、適切な始動方法についての検討が必要です。「誘導電動機の始動方式」については、質問番号 2020-0087 に対する回答をご参照下さい。